Robotik im OP
XTRA-ARTIKEL AUSGABE 1/2025
Die Chirurgie unterliegt, wie allgemein die Medizin, einem stetigen Wandel. Es geht darum, die chirurgischen Möglichkeiten zu erweitern, den „Schaden“ am Körper zu minimieren und die Sicherheit der Patientinnen und Patienten zu erhöhen. Gerade im Bereich der roboterunterstützten Chirurgie sind die Entwicklungen durch technologische Innovationen enorm. Aber wie kam es überhaupt dazu und wohin geht die Reise?
Text: Tobias Hamann

Die Ursprünge der roboterunterstützten Chirurgie
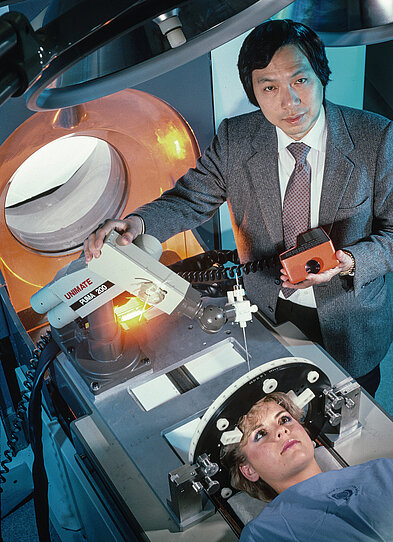
Die Ursprünge liegen zum einen in der Entwicklung der Industrieroboter ab den 1950er-Jahren: Die ursprünglich Ende der 60er- und Anfang der 70er-Jahre entwickelten Modelle PUMA-Roboter (Programmable Universal Maschine for Assembly) oder auch Kawasaki Unimate wurden sehr erfolgreich in der Autoindustrie eingesetzt.
Zum anderen liegen sie aber auch in der Weltraumforschung und im Bereich des Militärischen. Auf beiden Gebieten entstanden in den 50er- und 60er-Jahren des vergangenen Jahrhunderts erste Überlegungen zur Telemanipulation, also zur Steuerung eines Roboters ohne eine klassische Programmierung. Gerade für gefährliche oder unzugängliche Umgebungen überlegte man sich, wie die Bewegungen eines Körperteils, wie etwa der Hand, zur Steuerung eines Roboters getrackt werden können.
1985 wurde der PUMA für den ersten roboterunterstützten Eingriff am Menschen benutzt. Dabei handelte es sich um die Unterstützung zur Positionierung der Nadel für eine Hirnbiopsie.


Große Erwartungen – erste Ernüchterung
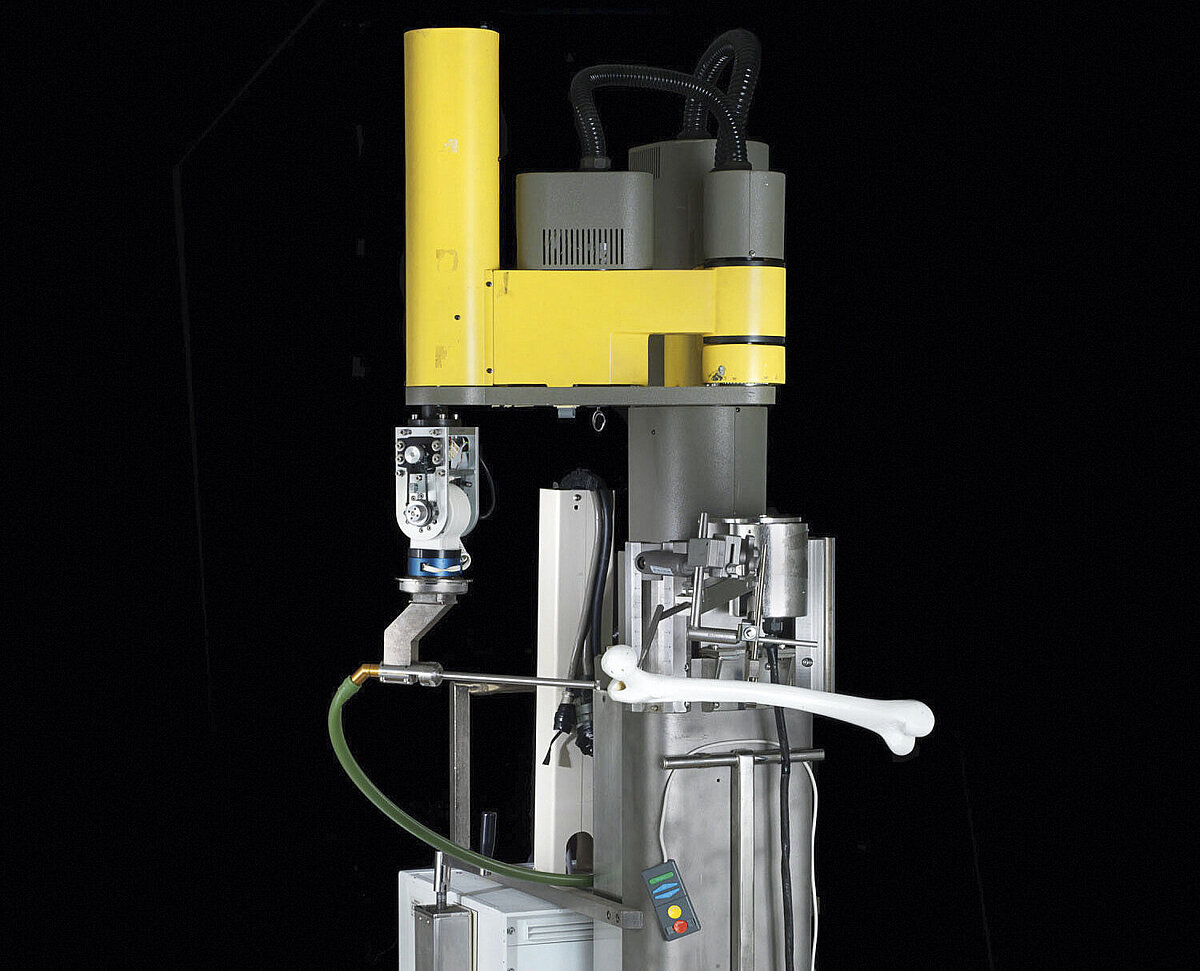
Nachdem die Hirnbiopsie mittels PUMA Ende der 80er-Jahre große Erwartungen in die Zukunft der Roboter im OP-Saal geweckt hatte, folgt in den 90ern mit dem Roboter Robodoc, der eigentlich das Einsetzen von Hüftprothesen erleichtern soll, eine Ernüchterung: Technisch noch nicht ausgereift, kommt es zu mehr Komplikationen als bei der herkömmlichen Methode. Es folgen viele Klagen von Betroffenen. Obwohl schon in über 100 deutschen Krankenhäusern installiert, scheitert das Robotersystem.
Auch in der klassischen Chirurgie kommt es zu Fortschritten
Der Gynäkologe Philippe Mouwret führt 1987 die erste videoassistierte laparoskopische Gallenblasenentfernung durch und sorgt damit dafür, dass sich die Laparoskopie als Chirurgietechnik etabliert und verbreitet. Es kommt zu einer regelrechten laparoskopischen Revolution in der Chirurgie.

Was ist eine laparoskopische Operation?
Heutzutage findet keine Operation im Bauchbereich mehr ohne Laparoskopie statt.
Bis ins 19. Jahrhundert wagte niemand, einer Patientin oder einem Patienten den Bauch aufzuschneiden. Hinter der Bauchwand des Menschen verbirgt sich ein komplexes Gemenge mit dem Magen-Darm-System, den verschiedenen Organen und den Bauchmuskeln. Das Bauchinnere steht so unter Druck, dass die Gedärme bei einer offenen Wunde sofort aus dem Körper weichen. Zudem ist die Bauchhöhle frei von Bakterien. Falls Keime oder Bakterien in die Bauchhöhle gelangen, droht eine lebensgefährliche Bauchfellentzündung.

Nachdem im 19. Jahrhundert erst das Endoskop und dann das Zystoskop erfunden wurden, findet 1901 die erste Laparoskopie, also Bauchspiegelung, durch Georg Kelling statt. Der Bauch eines Hundes wird mit Luft aufgeblasen, und mithilfe eines Zystoskops wird in den Bauch geschaut. Man konnte nun zwar ins Bauchinnere schauen, aber chirurgische Eingriffe sind noch nicht möglich.
Verschiedene Gynäkologen sorgen dann aber dafür, dass sich die diagnostische Laparoskopie zu einer therapeutischen entwickelt und diese schließlich Ende der 80er-Jahre den Durchbruch schafft.
Eine laparoskopische Operation ist heutzutage auf vier Elemente angewiesen: auf eine Lichtquelle, eine Kamera, einen Schlauch für das Kohlendioxid, um die Bauchhöhle aufzublasen, und dann natürlich auf die Klemmen und Instrumente, die für den eigentlichen Eingriff benutzt werden.

Chirurgie durchs Schlüsselloch
Die minimalinvasive Chirurgie setzt sich durch
Die ersten erfolgreichen laparoskopischen Gallenblasenentfernungen markieren den Beginn der minimalinvasiven Chirurgie, auch bekannt als Schlüssellochchirurgie. Während vorher noch ein 15 Zentimeter langer Schnitt zur Entfernung der Galle notwendig war, sind jetzt viel kleinere Schnitte möglich. Die Schmerzen für die Patientinnen und Patienten nach einer OP verringern sich deutlich. Der Aufenthalt im Krankenhaus reduziert sich von vorher einer Woche auf einen Tag. Da die Vorteile offensichtlich sind, entwickeln sich auch in anderen Chirurgiegebieten minimalinvasive Operationstechniken.

Die Grenzen der Laparoskopie
Die Instrumente, die bei einer klassischen Laparoskopie benutzt werden, haben allerdings auch ihre Beschränkungen:
Bei der OP werden Arbeitskanäle, sogenannte Trokare, in die Bauchwand eingeführt. Die Trokare haben luftdichte Klappen, durch die die Instrumente eingebracht werden. Dies führt dazu, dass die Instrumente sich in einer recht starren Position befinden und so die Bewegung und damit auch die operative Flexibilität einschränken. Das (zunächst) zweidimensionale Bild aus dem Inneren, das visuell auf einen Bildschirm übertragen wird, nimmt das Gefühl für die Tiefe der Gewebestrukturen. Bestehendes Handzittern wird durch die Instrumente noch verstärkt. Präzise chirurgische Manöver werden durch das bestehende Problem der Hand-Augen-Koordination erschwert. Die Einschränkungen der laparoskopischen Instrumente machen anspruchsvolle und komplexe chirurgische Eingriffe zu einer Herausforderung.


Schnittstelle Kamera
Bei der Laparoskopie ist man anfangs auf ein Laparoskop, ein spezialisiertes Endoskop, angewiesen, durch das man ein Bild aus dem Bauchinneren bekommt. Dieses optische Gerät muss gehalten werden. Die operierende Person hat also nur noch eine Hand zum Operieren frei.
1982 kommen die ersten CCD-Videokameras auf den Markt, die Bilder digital aufnehmen und verarbeiten konnten. Die Technik verbessert sich rasch, die Kameras werden kleiner. So klein, dass sie nun auch bei einer Laparoskopie eingesetzt werden können. Eine Assistenz hält die Kamera, und die Chirurgin oder der Chirurg hat beide Hände frei und über einen Monitor einen Blick ins Bauchinnere. Erst durch die Schnittstelle Kamera wird die Laparoskopie wirklich anwendbar.

Die Robotik im OP
Die dritte Hand: Robotik trifft auf Laparoskopie
Der laparoskopische Ansatz hat seine Grenzen, die ihm durch die Einführung der technischen Schnittstellen zwischen Patientin oder Patient und der chirurgisch tätigen Person inhärent sind.
In den 90er-Jahren trifft nun die sich immer weiter verbreitete Laparoskopie auf die fortschreitende Technik.
1993 wird das chirurgische Robotersystem AESOP (Automated Endoscopic System for Optimal Positioning) entwickelt, das erste Lösungen für diese bestehenden Grenzen bietet.
Die Chirurgin oder der Chirurg verlieren bei der laparoskopischen Operationstechnik die Kontrolle über ihr Sichtfeld, da eine Assistenz die Kamera bedienen muss. AESOP besitzt einen sprachgesteuerten Roboterarm mit einem Endoskop, wodurch die operierende Person eine „dritte Hand“ erhält und wieder selbst ihren Blick steuern kann. Außerdem wird das Bild aus dem Bauchinneren stabiler und droht durch den Roboterarm nicht zu verwackeln. Das Video-Laparoskop wird weiterentwickelt. Bald lassen sich zudem auch die Position des Operationstisches oder die Beleuchtung per Sprachbefehl steuern.

Operation Lindbergh
Am 9. Februar 1996 findet das weltweit erste Experiment mit Telechirurgie statt. Der belgische Chirurg Luc Vanderheiden, der sich in der Nähe von Brügge aufhält, bedient den Roboter, der die Kamera für die laparoskopische Schlüssellochoperation hält, die im 150 Kilometer entfernten niederländischen Nieuwegen stattfindet. Möglich ist dies durch das kurz vorher erfundene ISDN.
2001 – erste transatlantische Operation
Am 7. September 2001 führt der Franzose Jacques Marescaux die spektakuläre erste transatlantische Operation durch. Per Joystick führt er von New York aus eine laparoskopische Cholezytektomie (Gallenblasenentfernung) im 6.000 Kilometer weit entfernten französischen Straßburg durch. Möglich ist dies durch die Glasfaserübertragungstechnik. Die Vision aus den 60er-Jahren, aus der Ferne zu operieren, wird endgültig zur Realität.
„Master and Slave“
Mit dem integrierten Robotersystem ZEUS des Unternehmens Computer Motion setzt sich dann ab 1998 das eigentliche Konzept der Telepräsenz durch. Der „Master“, die operierende Person, steuert den „Slave“, den Roboter. Das System verfügt über drei Arme, die jeweils am OP-Tisch befestigt sind: ein AESOP-Arm mit Endoskop und zwei chirurgische Arme mit vier Freiheitsgraden. Die Bedienkonsole besteht aus einem Video monitor und zwei Griffen, mit denen die Instrumente bedient werden.
Freiheitsgrade
Arme von Robotern werden durch ihre Freiheitsgrade beschrieben. Diese Zahl bezieht sich auf die Anzahl der einachsigen Drehgelenke im Arm, wobei eine höhere Anzahl eine erhöhte Flexibilität bei der Positionierung ergibt.
Vorreiter
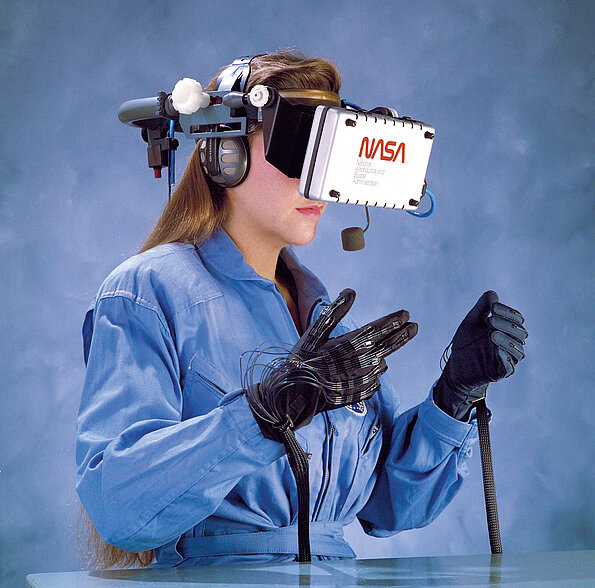
Der erste Versuch zur Entwicklung der „Telechirurgie“ wird 1987 am Stanford Research Institute (SRI) von Philip S. Green, einem biomedizinischen Ingenieur, und Joseph Rosen, einem Chirurgen, unternommen. Das von Green als „Telepräsenz-Chirurgiesystem“ bezeichnete System ähnelte den heutigen Master-Slave-Robotersystemen, da der Bedienende von einem entfernten Arbeitsplatz aus arbeitet, um die Instrumente zu bedienen. Nachdem man zuerst mit DataGloves, also vernetzten Handschuhen, experimentiert hatte, werden letztendlich Griffe zur Bedienung eingesetzt. Ursprünglich für die „offene“ Chirurgie konzipiert, wird das System später auf die laparoskopische Chirurgie übertragen.
Die Ära der Robotik
Die Hersteller des OP-Roboters ZEUS fusionieren 2003 mit einem Mitbewerber, dessen Prototypen auf den Patenten des Telepräsenz- Chirurgiesystems von Philip S. Green basieren.
Die laparoskopischen Operationsroboter werden immer weiter verbessert und setzen sich in der Folgezeit immer weiter durch, indem sie die Präzision und die Sicherheit von Operationen optimieren. Mehr Freiheitsgrade der Roboterarme sorgen dafür, dass das menschliche Handgelenk immer perfekter nachgeahmt wird. Die Handbewegungen der Bedienenden werden immer feiner skaliert, gefiltert und nahtlos auf die Instrumentenspitzen übertragen, um eine noch präzisere Instrumentensteuerung zu ermöglichen. Für die Chirurginnen und Chirurgen werden Konsolen entwickelt, wodurch Fokussierung und Konzentration verbessert wurden. Auch die Kameratechniken werden stetig weiterentwickelt.

Die Roboter bauen auf den Stärken der traditionellen Laparoskopie auf, überwinden aber ihre Grenzen, indem sie eine größere Flexibilität, Stabilität und Präzision sowie gleichzeitig mehr Sicherheit bieten. Sie erscheinen als eine natürliche und logische Entwicklung in der minimalinvasiven Chirurgie. Die Entwicklung der roboterunterstützen Chirurgie ist noch lange nicht abgeschlossen, da im Bereich der Technologie noch viele Innovationen möglich sind – zum Wohl der Patientinnen und Patienten.
Kawasaki & Sysmex
Richtung Zukunft
Medicaroid, ein Joint Venture von Kawasaki und Sysmex, hat mit dem Roboter hinotori einiges vor.
Der erste Versuch zur Entwicklung der „Telechirurgie“ wird 1987 am Stanford Research Institute (SRI) von Philip S. Green, einem biomedizinischen Ingenieur, und Joseph Rosen, einem Chirurgen, unternommen. Das von Green als „Telepräsenz-Chirurgiesystem“ bezeichnete System ähnelte den heutigen Master-Slave-Robotersystemen, da der Bedienende von einem entfernten Arbeitsplatz aus arbeitet, um die Instrumente zu bedienen. Nachdem man zuerst mit DataGloves, also vernetzten Handschuhen, experimentiert hatte, werden letztendlich Griffe zur Bedienung eingesetzt. Ursprünglich für die „offene“ Chirurgie konzipiert, wird das System später auf die laparoskopische Chirurgie übertragen.
